The goal of the project is to create a plane which can land and take off vertically. The plane has a transition system which allows his motors to rotate. Thanks to this rotation, the plane can fly in quadricopter mode (motors in horizontal position) and in plane mode (motors in vertical position).
The challenge of the project is to develop this system in order to implant it in a glider which was developed by a former group of students. The transition system will be removable to facilitate the plane’s transportation.
The plane will be controlled by a PixHawk flight controller. The challenge in programmation is to couple the quadricopter code and the plane code. Between these two modes we have to create the transition code which will control the motors’ rotation.
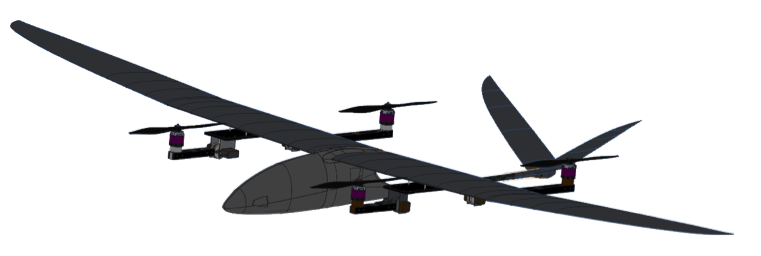
quadricopter mode
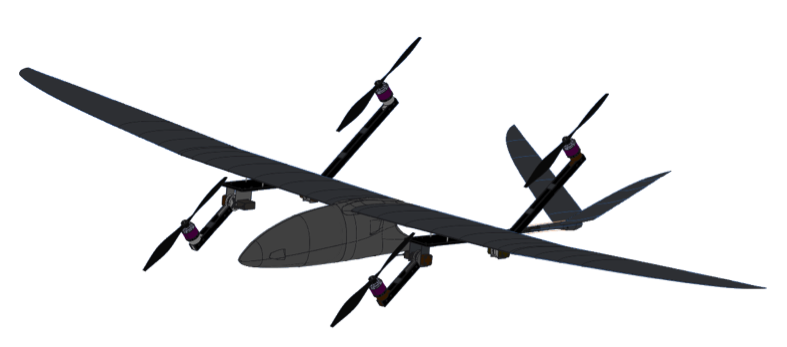
Transition
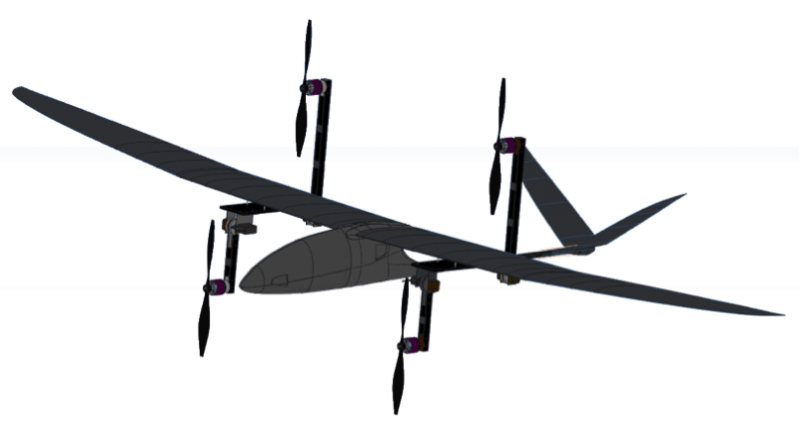
Plane mode