Depuis deux ans, les étudiants en spécialité mécatronique exploitent en informatique industrielle des maquettes développées spécifiquement au sein du département mécanique. Alors que la formation vient de s’achever pour cette année académique, bref retour sur les matériels exploités et la démarche conduite au sein du département mécanique.
Le comportement dynamique, la complexité de dispositifs mécatroniques tels que robots ou machines spéciales requiert aujourd’hui des solutions avancées de contrôle et commande. Les technologies industrielles sont ainsi en constante évolution. Solutions basées sur PC, système d’exploitation temps réel et bus de terrain sont une voie. L’emploi d’un logiciel comme Labview pour l’instrumentation et la commande, via des dispositifs à base de FPGA (field-programmable gate array), en est une autre. Cédric Roth, assistant-ingénieur à la plateforme mécanique et Loïc Mosser, missionné d’enseignement et doctorant au sein de l’unité de recherche ICube, font découvrir aux étudiants de spécialité mécatronique ces technologies, en les mettant en œuvre par des travaux pratiques.
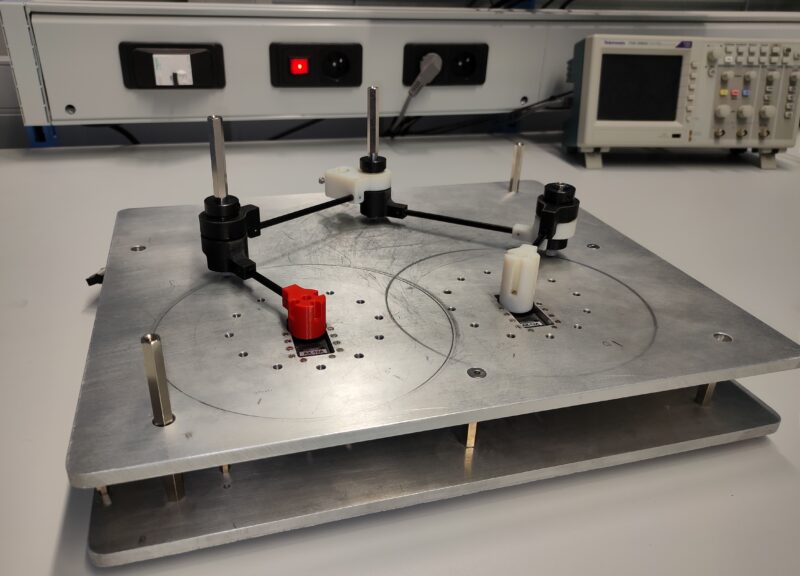
Maquette pédagogique pour l’informatique industrielle : version exploitant les solutions FPGA National Instruments
Pour appréhender ces technologies, il n’existe pas de matériels standards adaptés. Olivier Piccin et Marc Védrines, enseignants-chercheurs du département mécanique ont donc développé intégralement des maquettes conjointement avec avec les personnels de la platefome mécanique, Cédric Roth et Olivier Schalck, et Laurent Barbé, ingénieur de recherche à l’Université de Strasbourg, responsable technique de la plateforme IRIS, et enseignant vacataire à l’INSA Strasbourg. Une gestion de la conception à l’intégration en passant par la production de composants spécifiques entièrement au sein de l’INSA.
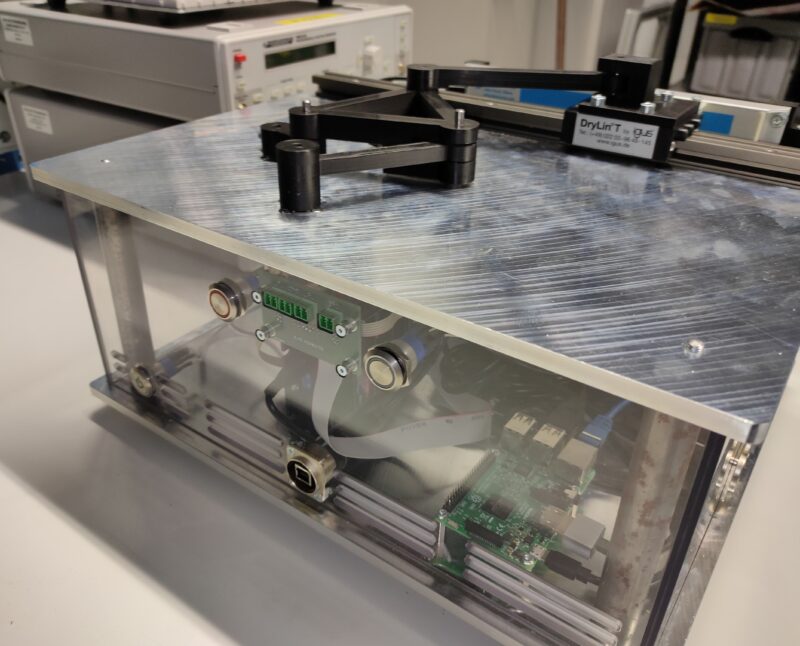
Maquette construite sur base Raspberry & Ethercat
Deux types de systèmes sont aujourd’hui exploités en 5e année de formation : l’un est piloté par une solution à base d’ordinateur monocarte Raspberry, sur lequel est installé un OS temps réel Linux Xenomai avec une communication par bus de terrain EtherCat et l’autre est construit pour être piloté par le biais d’un système FPGA National Instruments myRIO par bus de terrain RS485. Des technologies de pointe mises en œuvre au sein de l’INSA Strasbourg au profit de ses étudiants !

Espace dédié à la mécatronique au sein de la plateforme mécanique