Dans le cadre du projet d’intégration robotique de l’INSA Strasbourg (année 2025-2026), des étudiants en 4e année de formation mécatronique et génie mécanique ont développé un système interactif permettant de contrôler un robot industriel FANUC à distance à l’aide d’un simple point lumineux détecté par caméra.
Le projet a été mené par Nada Gouaskar (MIQ4), Romain Lemaitre (GM4), Clément Masson (MIQ4), et Ilian Schindele (MIQ4). Il repose sur l’utilisation d’un robot industriel FANUC LR Mate 200iC piloté à partir d’un système de suivi lumineux par caméra.
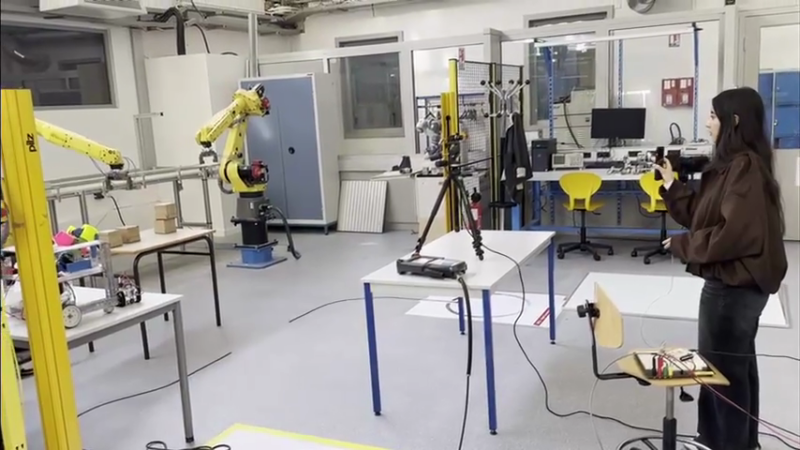
L’objectif était de piloter ce robot à distance sans contact avec l’interface de commande et de réaliser une interaction ludique. Les étudiants ont alors choisi la stratégie qui consiste à détecter la position d’une source lumineuse (par exemple le flash d’un téléphone) devant une caméra. Cette position est ensuite convertie en signaux analogiques transmis au robot afin de reproduire les mouvements de l’utilisateur en temps réel.
Le robot est équipé d’une pince pneumatique permettant d’interagir avec différents objets. Les étudiants ont choisi de mettre en place un jeu de type “stack”, consistant à empiler des boîtes sans faire chuter la structure.
Le projet mobilise plusieurs compétences du parcours :
- modélisation cinématique du robot
- acquisition vidéo temps réel
- détection et suivi d’objet lumineux
- programmation LabVIEW
- conversion et transmission de consignes analogiques
- programmation d’un robot industriel FANUC.
Les étudiants ont également dû gérer plusieurs contraintes techniques liées à la transmission des informations et à l’interaction temps réel avec le robot, notamment la conversion des coordonnées image du point lumineux vu par la caméra, en tensions analogiques ainsi que la gestion des états de la pince pneumatique via un codage des niveaux de tension.
Ce projet s’inscrit dans le Parcours 4 « Conception pour la robotique », et plus spécifiquement dans le module « Projet d’intégration robotique », qui place les étudiants en situation de prise en main d’un robot industriel intégrant traitement d’image, traitement du signal, et programmation de robot.
La vidéo ci-dessous présente le système réalisé ainsi que les principales étapes de fonctionnement et les choix techniques associés.